8 02 미래 제품 생산 체계에서 BOM 역할
 |
|
 |
8.2 미래 제품 생산 체계에서 BOM 역할
미래 제품이나 생산 시스템은 변화된 제품 생산 체계, 정보 기술 그리고 디지털 변환 결과에 기반한다. 미래 제품과 생산 시스템에서 BOM 역할을 알아보기 위하여 인공지능과 클라우드 기술이 적용된 스마트 커넥티드 마네킹과 개인화 생산을 지원하는 자동 로봇 조립 시스템에서 BOM 역할을 살펴본다.
8.2.1 클라우드와 AI 기반 스마트 커넥티드 마네킹
1) C 마네킹 소개
C 마네킹은 그림 8.3과 같이 기존 마네킹에 사람 접근을 감지하는 접근 센서와 카메라가 연결된 소형 컴퓨터인 라즈베리파이를 추가한 스마트 커넥티드 제품이다. C 마네킹은 라즈베리파이에서 프로그램을 실행할 수 있으며 무선 와이파이를 통해 인터넷에 연결할 수 있다. 인터넷 연결을 통하여 C 마네킹은 다양한 클라우드 서비스를 이용할 수 있다.

그림 8.3 C 마네킹의 센서와 카메라를 조립한 라즈베리파이(a)와 마네킹에 설치한 모습(b)
그림 8.4a는 C 마네킹의 동작 과정을 설명한다. C 마네킹은 옷에 관심이 있는 고객이 접근하면 접근 센서를 통해 이를 감지한다①. 접근을 감지한 라즈베리파이의 프로그램은 카메라를 작동시켜 접근 고객의 사진을 찍는다②. 프로그램은 찍은 사진을 인공지능 클라우드 서비스로 보내고③ 그 결과로 성별과 나이값을 받아 고객 접근 데이터베이스에 기록한다④. 즉 C 마네킹은 기존 옷을 전시하는 마네킹 기능을 확장하여 옷에 관심 있는 고객의 수뿐만 아니라 접근 시간, 성별 그리고 나이까지 파악할 수 있다.

C 마네킹은 개별 제품의 기능을 확장했을 뿐만 아니라 그림 8.4b와 같이 여러 마네킹과 구독 사용자를 연결한 플랫폼을 운영함으로써 그 영향력을 극대화할 수 있다. C 마네킹 플랫폼은 다수의 마네킹 관리와 자료 수집 그리고 분석뿐만 아니라 플랫폼 구독자에게 축적된 자료를 이용한 다양한 서비스를 제공할 수 있다.
2) C 마네킹을 지원하는 BOM
C 마네킹을 개발하기 위해 소프트웨어 하드웨어 통합 개발을 지원하는 BOM 확장이 필요하다. 스마트 커넥티드 제품은 기존 제품에 비해 소프트웨어와 네트워크의 역할이 크게 확장된다. 특히 제품보다 대규모 소프트웨어와 네트워크 집합체인 플랫폼의 구성과 유지에 많은 역할이 추가된다. 그러므로 C 마네킹 개발을 지원하는 BOM은 제품 개발 과정 중 체계적이고 종합적인 소프트웨어 개발을 지원해야 한다.
첫째, BOM에 소프트웨어 부품(아이템)을 추가해야 한다. 소프트웨어 아이템은 하나의 소프트웨어 모듈을 대표하며, 연관 객체로 프로그램 소스 코드를 가질 수 있다. 소프트웨어 아이템은 소프트웨어 개발을 지원하는 소스코드 관리와 협업 기능을 제공해야 한다. BOM에 소프트웨어 아이템을 추가함으로써 기존 하드웨어 아이템과 동일한 데이터베이스와 온라인 프로그램을 통한 협동 작업 환경을 제공한다. 그림 8.5는 소프트웨어, 전자 그리고 기계 아이템이 통합된 C 마네킹의 E-BOM 구조를 보여준다.
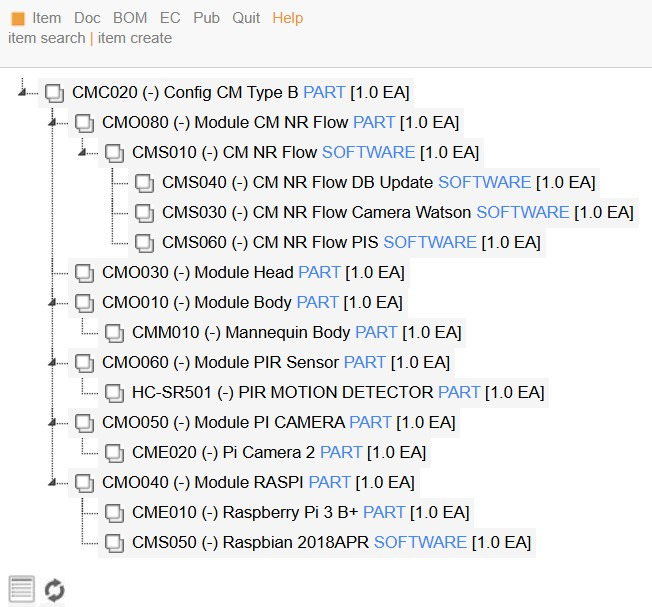
그림 8.5 C 마네킹의 제품 구성과 제품구조
둘째, 소프트웨어 부품을 기반으로 소프트웨어 제품 구성 모듈을 제공해야 한다. 소프트웨어 제품 구성은 기존 기계 부품 중심의 하드웨어 제품 구성과 조합하여 최종 제품 구성에 참여할 수 있어야 하며, 시제품 개발이나 설계변경 시 연계된 하드웨어와 통합 관리가 가능해야 한다. 소프트웨어 제품 구성은 소프트웨어 개발을 위한 Sofotware Configuration Management 기능을 제공해야 한다. 예로 그림 8.5의 CMC020 제품 구성은 하드웨어 제품 구성 모듈 외에 소프트웨어나 전자 부품 모듈을 조합하여 구성된 것을 확인할 수 있다. 이 제품 구성은 단일 설계변경 내에 관련된 하드웨어와 소프트웨어 변경을 통합 진행할 수 있다. 예로 CMO050 카메라 모듈이 변경되면 카메라 설치 구조를 제공하는 CMO030 기계 부품과 관련 소프트웨어인 CMS030 소프트웨어 아이템 변경을 포함한 설계변경 객체를 정의할 수 있다.
셋째, 플랫폼 기반 제품 개발을 지원해야 한다. 플랫폼은 개별 제품뿐만 아니라 제품군과 이전 제품에 공유되는 모듈을 포함할 수 있으며, 개발 제품의 운영체제나 네크워크 프로토콜, 클라우드 서비스 연결 그리고 보안 등의 공용 기반을 제공한다. 플랫폼에서 제공하는 공용이나 기반 모듈은 BOM의 제품 구성 모듈 등으로 제공되어야 하며, 플랫폼의 변경이나 개선이 기존 제품과 개발 제품에 주는 영향을 전달할 수 있어야 한다. 예로 그림 8.5의 외부 클라우드 서비스로 CMS030 소프트웨어 아이템을 사용하고 있다. 이 클라우드 서비스는 IBM Watson의 얼굴 인식 AI 서비스로 플랫폼에서 공통으로 연결하여 사용하는 서비스로 연동되어야 한다.
|
BOM은 스마트 커넥티드 제품을 지원하기 위하여 하드웨어/소프트웨어 부품, 하드웨어/소프트웨어 제품 구성과 설계 변경 그리고 플랫폼 기반 제품 개발을 지원해야 한다.
|
8.2.2 개인화 생산을 지원하는 자동 로봇 조립 계획
1) TRIP 시스템 소개
개인을 위한 경제적 소량 생산을 지원하기 위해 소량 부품 생산과 경제적인 조립 과정이 필요하다. 소량 부품 생산을 지원하기 위해 금속 3D 프린팅을 도입하고, 소량 제품의 경제적 조립을 위해 자동 로봇 조립 계획 시스템을 적용할 수 있다. 그러므로 개인화 생산 체계를 지원하기 위해 조립품의 3D CAD 모델로부터 자동으로 로봇 조립 계획을 생성할 수 있는 자동 로봇 조립 계획 시스템이 연구되었다.
Team Robotics Intelligence Platform (TRIP)으로 이름 지어진 자동 로봇 조립 계획 시스템은 조립품의 3D CAD 모델이 제공되면 해당 제품을 조립하는 로봇 계획을 자동으로 생성하는 정보 시스템이다. TRIP 시스템은 그림 8.6과 같이 4개 단계를 거쳐 로봇의 이동 경로로 이루어진 로봇 조립 계획을 생성한다. 첫째, 3D CAD 모델로부터 제품 형상과 E-BOM을 추출하여 CAD와 BOM 데이터베이스를 생성한다①. 둘째, 각 구성부품의 조립 형상 특성을 결정한다②. 셋째, 구성 부품의 조립 순서와 조립 가능성을 결정한다③. 넷째, 조립 순서에 따른 로봇 조립 계획④을 생성한다. 마지막으로 계획을 로봇을 통해 실행한다⑤.

그림 8.6 TRIP 구조 와 로봇 조립 계획 과정
첫째, TRIP 시스템은 3D CAD 모델로부터 제품 형상(Shape) 정보와 설계 관점을 제공하는 E-BOM을 추출하여 각각 CAD와 BOM 데이터베이스에 저장한다. 제품 형상 정보도 객체화하여 CAD 데이터베이스에 저장하는 이유는 복잡한 자동 로봇 조립 계획 과정에서 제품 형상에 대한 다양한 속성 검색과 계산을 효율적으로 지원하기 위해서다. 추후 자율화가 진행될수록 제품 형상에 대한 검색 요구가 커지므로 기존 파일 기반의 CAD 자료 관리는 CAD 데이터베이스로 전환되어야 한다. 상용 시스템으로서 Dassaults Systemes CATIA는 V5부터 제품 형상의 객체화를 지원하는 CAD 데이터베이스를 적용하고 있다.
둘째, TRIP 시스템은 CAD 데이터베이스를 이용하여 구성 부품의 조립 특징 형상을 분류하여 조립 가능 방향을 결정한다. 조립 특징 형상이란 조립 가능 방향이나 방법을 결정하는 부품 형상의 특징이다. 예로 그림 8.7a의 실린더 특징 형상은 실린더 형상의 양쪽 축 방향으로 조립 가능하다. 그림 8.7b의 한쪽이 막힌 구멍(Blind Hole) 특징 형상인 경우 막힌 쪽으로 조립이 불가능하므로 구멍이 열린 쪽 방향으로만 조립이 가능하다. 기존 접근은 부품의 기하학적 속성을 이용한 규칙을 프로그램화하였으나, 최근 기계 학습을 이용한 AI 기반 특징 형상 분류 규칙 추출이 적용되고 있다.

그림 8.7 부품의 조립 특징 형상 예, 실린더 a) Blind Hole b)
셋째, 각 부품의 특징 형상과 조립품에서 위치와 방향 등을 이용하여 부품 조립 순서를 결정한다. 조립 순서를 결정하기 위해 구성 부품의 상대 위치와 조립 가능 방향 등을 고려한 조립 순서 결정 규칙을 프로그램한다.
넷째, 주어진 구성 부품의 조립 순서를 기반으로 로봇 이동 경로인 로봇 조립 계획을 생성한다. 조립 로봇의 이동 경로는 주어진 위치에서 다음 특정 위치로 로봇 단위 이동인 Action의 순서(Sequence)로 이루어진다. 한 부품을 이동시키는 Action의 순서를 Operation이라고 하며, 조립 구성품에 대한 Operation의 순서를 Work라 한다. 그러므로 Work는 조립품을 완성시키는 로봇 조립 계획 전체를 뜻한다.
그림 8.8은 TRIP 시스템에 사용된 로봇팔과 카메라가 설치된 작업장과 시험 예제로 사용된 부품과 조립품을 보여준다.

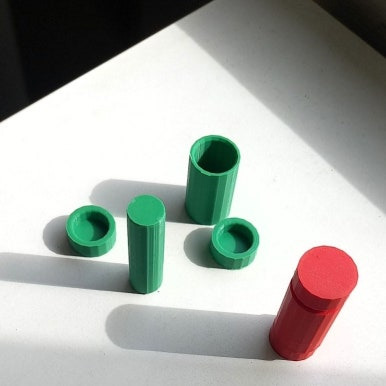
그림 8.8 TRIP의 로봇팔과 카메라가 설치된 작업장(왼쪽), 조립 예제 부품과 조립품(오른쪽)
2) 자동 로봇 조립 계획을 지원하는 BOM
자동 로봇 조립 계획은 일종의 컴퓨터 지원 생산(Computer-Aided Manufacturing: CAM) 시스템이다. 대표적인 CAM 시스템은 단품 CAD 모델로부터 부품을 가공하는 컴퓨터 수치 제어(CNC) 프로그램을 자동으로 생성하는 시스템이다. 자동 로봇 조립 계획 시스템은 자동 CNC 프로그래밍 CAM과 다르게 여러 개의 구성품이 존재하고 중간 조립품이 생성되는 공정이 포함된다. 그러므로 자동 로봇 조립 계획의 각 단계에 중간 조립품 형상과 공정에 관련된 복잡한 제품과 환경 정보가 필요하다. TRIP 시스템은 공정이 포함된 중간 조립품 자료를 체계적으로 지원하기 위하여 E-BOM, M-BOM 그리고 프로세스 BOM 기반의 자료 모델과 데이터베이스를 적극적으로 사용한다.
첫째, CAD 데이터베이스와 연계된 BOM 데이터베이스 기반의 통합 제품 자료 검색이 가능하다. CAD 데이터베이스 적용의 이점 중 하나는 BOM 데이터베이스와 동일 환경에서 데이터베이스 간 연계 검색이 가능한 점이다. 특히 관계형 데이터베이스 관리 시스템을 사용했을 경우 SQL이라는 강력한 질의 언어를 이용한 통합 검색이 가능하다. 예로 중간 조립품의 형상 정보를 검색할 때 BOM 정보와 형상 정보를 연계하여 검색하는 하나의 SQL 검색 명령어를 이용하여 효과적으로 제품구조와 형상 정보를 추출할 수 있다.
둘째, M-BOM을 사용하여 로봇의 부품 조립 순서를 효과적으로 표현할 수 있다. 로봇이 부품을 하나씩 조립하는 단계는 각 부품을 조립하는 공정 작업의 순서로 볼 수 있다. 즉 기존 작업자의 공정 작업 순서를 로봇의 조립 작업 순서와 대응시킬 수 있다. 단 로봇의 조립 작업 순서는 로봇이 자동으로 실행할 수 있도록 각 과정을 세분화하고 완결되게 제공해야 한다. TRIP 시스템은 부품의 조립 순서를 결정하고 이를 공정에 대응하여 BOM 계층으로 편성하기 위해 M-BOM을 사용한다. 예로 그림 8.9의 M-BOM은 하나의 부품을 고정하고 다른 부품을 로봇이 이동시켜 중간 조립품을 만들고(예로 c와 b로 asm0 조립), 다시 중간 조립품에 조립 순서의 다음 부품을 이동시켜 새로운 중간 조립품을 만드는 과정(예로 asm0와 s로 asm1 조립)을 반복하여 마지막 최종 제품을 만드는 과정(asm2)을 표현한다. 로봇 조립 계획 중간에 생성되는 복잡한 조립 과정과 중간 조립품을 표현하기 위해 M-BOM을 효과적으로 사용할 수 있다.

그림 8.9 CAD로부터 추출한 E-BOM, 조립 과정을 표현하는 M-BOM, 로봇 조립 계획을 표현한 P-BOM
셋째, 로봇 조립 계획을 표현하기 위해 프로세스 BOM을 사용한다. M-BOM 계층이 로봇 각 단위 공정 작업에서 이동시켜야 할 부품과 중간 조립품의 순서를 결정한다면, 로봇 조립 계획은 각 대상 부품에 적용되는 로봇의 동작을 뜻한다. 로봇의 각 단위 동작은 앞에서 다룬 프로세스 BOM의 공정 작업 객체와 대응된다. 예로 그림 8.9의 P-BOM에 각 중간 조립품에 부품의 로봇 조립 계획인 Operation이 정의되어있다. 각 Operation은 6개의 Action의 순서로 정의되어 있으며, 전체 Opartion의 순서로 로봇 조립 계획이 완성된다. 그림 8.10은 BOM 데이터베이스의 M-BOM과 프로세스 BOM을 가시화한 웹 응용 프로그램 화면이다. M-BOM의 부품별 로봇 조립 과정을 대표하는 asm0, asm1 그리고 asm2 중간 조립품이 표시되어 있으며, 프로세스 BOM의 부품 별 로봇 작업인 Operation인 op0, op1 그리고 op2가 대상 아이템의 하위 아이템으로 정의되어 있다. Operation에는 단위 로봇 작업인 Action의 순서가 정의된다. 그림 8.4에서 asm1의 Operation인 op1에 6개 Action 순서가 정의된 것을 확인할 수 있다.

그림 8.10 로봇 조립 계획을 표현하는 프로세스 BOM
|
BOM은 자동 로봇 조립 계획을 지원하기 위하여 CAD로부터 E-BOM, 로봇의 제품 조립 순서를 표현하는 M-BOM 그리고 조립 명령을 표현하는 프로세스 BOM을 지원해야 한다.
|
3) 자동 로봇 조립 계획에 적용된 기계 학습 모델을 지원하는 BOM
정보 기술 발전에서 다루었듯이 기계 학습 기반의 인공지능은 지식 집약적인 제품 개발과 생산 과정의 의사 결정을 빠르게 자동화시키고 있다. 자동 로봇 조립 계획에서도 다양한 단계에 기계 학습 기반 자동화가 이루어지고 있다. 예로 그림 8.11은 로봇 조립 계획 실행 시 카메라로 작업대에 무작위로 흩어진 구성 부품을 식별하고 위치를 결정하기 위한 기계 학습 모델 훈련과 적용 단계를 보여준다. 이미지에서 대상을 식별하고 위치를 결정하는 AI 기법을 객체 탐색(Object Detection)이라고 하며, 예와 같이 부품이 대상 객체인 경우 부품 탐색(Part Detection)이라고 한다.
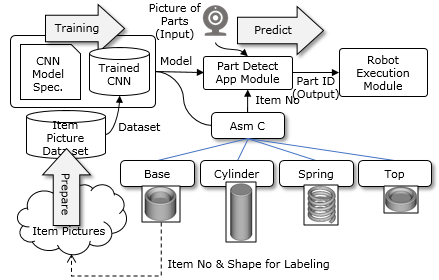
그림 8.11 작업대의 부품 탐색을 지원하는 기계학습 기반 시스템 구조
그림 8.11의 예는 Asm C 조립품을 조립하는 공정에서 로봇이 작업대에 흩어져 있는 4개 부품(Base, Cylinder, Spring 그리고 Top)을 순서대로 집어 조립하기 위해 부품 탐색을 통해 각 부품을 식별하고 그 위치를 결정해야 한다. 그림에 화살표로 표시된 Prepare, Training 그리고 Predict는 기계 학습 모델(Machine Learning Model) 모델을 위한 데이터셋 준비(Prepare), 데이터셋을 이용한 기계 학습 모델 훈련(Training) 그리고 훈련된 모델을 이용한 관심 값 예측(Predict) 단계를 뜻한다. 훈련된 기계 학습 모델은 조립 대상 조립품에 연결되어 해당 조립품을 조립하는 로봇 조립 과정에 적용한다. 그림 8.12는 객체 탐지 기계 학습 모델인 YOLO V8 모델을 사용하여 부품 탐지를 실행한 화면이다.

그림 8.12 YOLO v8을 이용한 작업대 부품 탐색 결과, 부품 식별자, 위치, 확률 출력
다양한 기계 학습 모델을 제품 개발과 생산에 사용하기 위해 모델의 효율적 관리와 공유가 필요하다. TRIP은 BOM의 아이템에 연결된 연관 객체로서 기계 학습 모델을 관리한다. 그림 8.11과 같이 기계 학습 모델을 적용할 아이템과 연결하면 모델이 조립품의 부품의 사진 이미지만 학습하면 된다. 한 기업의 모든 부품 아이템의 이미지를 학습시킨 모델을 준비할 수도 있지만 이 경우 모델의 클래스 값이 커지며 학습해야 할 데이터셋도 방대해진다. 특히 설계변경에 의해 부품이 변화될 때마다 모델을 새로 생성해야 하는 어려움이 있다. 그림 8.13은 예제 Asm C 조립품 아이템에 연관 객체로 훈련된 기계 학습 모델 Asm C YOLOv8 Trained Model이 관리되는 화면이다.

그림 8.13 조립품의 연관 객체로 관리되는 기계 학습 모델
훈련된 기계 학습 모델을 BOM의 아이템 목록에 연관된 객체로 관리하면 설계변경 시 기존 기계 학습 모델을 재사용할 수 있다. 그림 8.14와 같이 설계 변경에 의해 관리되는 변경된 부품 정보를 이용하여 기존 기계 학습 모델의 일부만 학습시키는 전이 학습(Transfer Learning)을 적용할 수 있다. 이와 같이 BOM의 구성 요소(아이템 목록의 연관 객체)로 기계 학습 모델을 관리하면 BOM을 통해 기간 제품 개발과 생산 참여 인력이 모델을 공유하여 협동 작업을 할 수 있고, 효과적인 모델 생성과 적용 그리고 설계변경에 대응된 효율적 모델 재사용이 가능하다.

그림 8.14 전이 학습을 통해 설계변경과 통합된 기계 학습 재사용 방법
|
BOM은 자동 로봇 조립 계획에 적용되는 기계 학습 모델을 M-BOM의 연관 객체로 효율적으로 관리하고, 설계 변경 시 전이 학습을 적용하여 재사용할 수 있다.
|
8.2.3 확장하는 BOM 응용
이 책의 7장 통합 BOM과 제품 자료 모델의 그림 7.8은 제품구조 관점에서 BOM의 발전을 기존 6개 다른 응용으로 설명하였다. 그림 8.15에 아이템 목록(a), BOM 계층(c), 설계변경(d), 제품 구성(e) 유효성에 의한 변형품(f) 그리고 제품 관점(g)이 포함되어 있다. 그림 8.15b의 기술 문서 등 연관 객체는 제품구조를 통한 아이템 목록의 일관성을 이용한다는 관점에서 추가하였다. 이와 같이 현재 BOM은 그림 8.15의 (a)에서 (g)까지 7가지 표현 방법을 사용하고 있다.

그림 8.15 확장되는 BOM 응용
미래 BOM을 위해 현재 일부 사용되거나 시험되고 있는 BOM 응용은 그림 8.5의 (h)에서 (j)까지 3가지이다. 이 중 CAD 데이터베이스(h)와 기계 학습 모델 관리(i)는 이전 절에서 다루었다. CAD 데이터베이스는 이미 객체화되어 있는 BOM 데이터베이스에 제품 형상을 객체화 시켜 동일한 환경에서 연결하여 관리하는 방식이다. BOM과 통합된 객체 수준의 제품 형상 검색이 가능하므로 형상 관련 AI 응용에 적합하다. 기계 학습 모델 관리는 제품 개발과 생산에 또 다른 혁신을 가져올 수 있는 AI의 핵심인 기계 학습 모델을 기간 정보 체계인 BOM을 통하여 전사적 공유가 가능하고, M-BOM에 연결함으로써 공정과 연계된 효율적 응용과 설계변경과 연동된 모델 재사용이 가능하다. 마지막 소셜 미디어(j) 연계는 일본 자동차 회사의 접근 방법으로 소셜 미디어를 연관 객체로 각 아이템 목록에 추가함으로써 제품 개발과 생산에 대한 비정형 자료를 관리하는 응용이다. 이는 빅데이터 분석 등을 적용함으로써 제품 개발과 생산 참가자 간의 관계와 정형화되지 않은 지식을 체계화하는 목적을 가진다.
그림 8.5에서 정리한 바와 같이 제품 생산 체계를 지원하는 BOM은 아이템 목록과 BOM 계층을 기반으로 다양한 응용 방법과 객체를 추가함으로써 지속적으로 확장되어 왔다. 앞으로 BOM을 기반으로 더욱 다양한 응용이 실현될 것으로 예측된다. 특히 정보 기술의 발전과 제품 개발과 생산의 AI를 기반한 완결된 자동화와 자율화를 지원하기 위해 기존 인간을 위한 BOM 확장 외에 기계와 소프트웨어 모듈을 위한 BOM 응용이 활성화될 것으로 예측된다.
|
제품 생산 체계를 지원하는 BOM은 아이템 목록과 BOM 계층을 기반으로 다양한 응용 방법과 객체를 추가함으로써 지속적으로 확장되어 왔다.
|
2025 NDoLab
2025/2/13 처음 2025/2/13